1. The Fundamental Divide: Scalar vs. Vector
To analyze vehicle motion, we must define the two variables in the context of kinematics: * Speed (Scalar): This represents magnitude only. It is the rate at which an object covers distance ($s = d/t$). If your dashboard indicates 70 MPH, it is reporting speed regardless of your heading. * Velocity (Vector): This requires both magnitude and direction ($v = \Delta x / \Delta t$). To report velocity, the system must provide a vector, such as '70 MPH North-West'.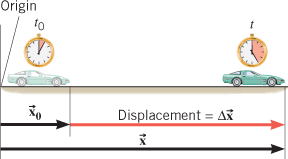
2. The Verdict: What Does Your Speedometer Actually Show?
Strictly speaking, a standard car speedometer measures speed, not velocity. It is designed to provide a single data point: magnitude. It lacks the sensory equipment—on its own—to establish a directional reference.The Data Path
1. Rotation Counting: A Vehicle Speed Sensor (VSS) monitors the rotational frequency ($f$) of the transmission output shaft or wheel hubs.2. Logic Processing: The Engine Control Unit (ECU) converts these pulses into a linear distance over time based on a hard-coded tire circumference constant. 3. HMI Output: This scalar value is transmitted to the dashboard. Because the sensor is unidirectional, the display cannot distinguish between forward motion or a vehicle being towed backward at the same rate.
3. Why Velocity is the 'Golden Ticket' for Automation
While speed is sufficient for human compliance with traffic laws, autonomous and ADAS (Advanced Driver Assistance Systems) require velocity vectors for spatial awareness. Automation tools rely on this data for 'Path Planning'—understanding the vehicle's trajectory relative to static and dynamic obstacles.4. How Tech Systems Bridge the Gap (Sensor Fusion)
Modern vehicle automation 'creates' velocity by fusing data from the scalar speedometer with other directional sensors: * GPS/GNSS: By tracking position changes between 3D coordinates, GPS calculates both ground speed and the heading vector. * Inertial Measurement Units (IMU): Utilizing 3-axis accelerometers and gyroscopes, an IMU detects changes in pitch, roll, and yaw, allowing the system to determine how velocity vectors shift during cornering.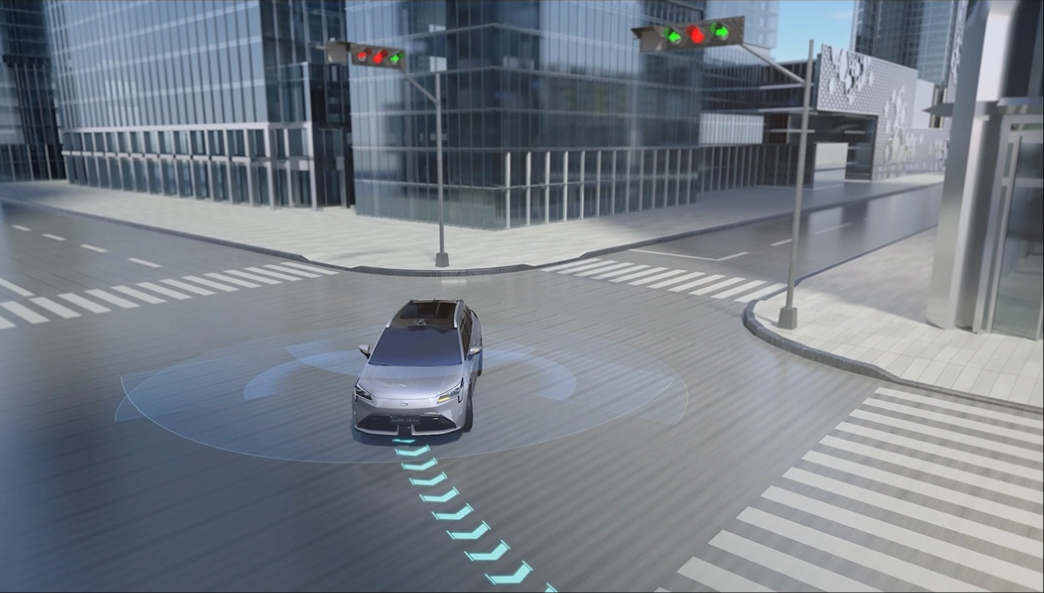
* Radar and LiDAR: These 'active' sensors measure the relative velocity of surrounding objects. By comparing the vehicle's own speed with the frequency shift (Doppler effect) of reflected waves, the car understands its closing speed relative to other vectors.
Conclusion
A car speedometer is a master of magnitude but a stranger to direction. While the needle on the dash remains a scalar tool, the underlying automation suites are increasingly vector-driven. By integrating directional data with rotational pulses, engineers ensure that the vehicle doesn't just know 'how fast' it is moving, but exactly 'where' it is headed in a three-dimensional world.