1. The Mechanical Reality: VSS and Rotation
Most modern vehicles capture velocity via a Vehicle Speed Sensor (VSS), typically mounted on the transmission output shaft. The VSS monitors the rotation frequency of the gears and broadcasts this data to the ECU.Because the sensor measures the frequency of pulses generated by rotating metal teeth, it cannot distinguish between clockwise and counter-clockwise rotation in standard configurations. Whether the vehicle is accelerating in 'Drive' or 'Reverse', the pulse train remains the same, and the speedometer reflects a positive integer.
2. Scalar vs. Vector: The Information Gap
In physical telemetry, we distinguish between two types of data: * Speed (Scalar): The magnitude of motion. The speedometer shows how fast the vehicle is moving across the ground. Velocity (Vector): The magnitude plus* the direction. True velocity requires secondary inputs to determine the vehicle's trajectory.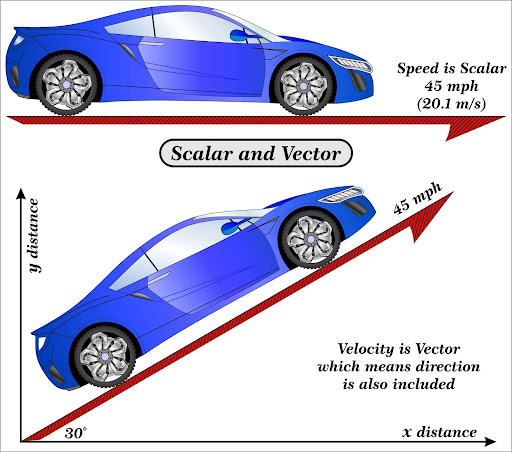
For the driver, directional context is provided by the Transmission Range Sensor (TRS) and visual cues. For automated driving systems, this context is derived from Sensor Fusion, where wheel speed is cross-referenced with internal accelerometers and GPS data.
3. Engineering Directional Awareness: Sensor Fusion
To move beyond scalar speed, modern digital cockpits utilize a suite of integrated sensors to verify 'Forward' motion: 1. Inertial Measurement Units (IMUs): These detect G-forces and rotation, identifying if the vehicle is reversing or experiencing yaw. 2. GNSS Doppler Shifts: GPS chipsets analyze the frequency shift of satellite signals to determine the absolute ground vector, confirming if the 'Speed' on the dash aligns with the 'Direction' on the map.4. Step-by-Step: Benchmarking Telemetry Accuracy
If you are developing or auditing a vehicle tracking system, follow this logic to ensure directional integrity: 1. Establish a Directional Flag: Pull the gear position PID from the OBD-II bus to define the current motion vector. 2. Implement Multi-Point Validation: Compare the VSS output against the GPS 'Heading' variable. If the VSS shows 15 mph but the GPS coordinates are static or reversing, a sensor error or wheel slip is detected. 3. Coordinate Logic: Use a high-refresh IMU to smooth out GPS latency, providing a real-time 'Forward' confirmation even in signal-dead zones.
Conclusion
So, does a speedometer indicate forward movement? Technically, no—it indicates raw kinetic activity. For the precision-focused driver or developer, magnitude is only half of the equation. To achieve true velocity awareness, one must look beyond the needle and integrate the complex web of directional sensors that define a vehicle's true path.