1. The Mechanical Bias: Why Dashboards 'Over-Clock'
Your car does not directly measure Ground Speed (SOG). Instead, it samples the rotation frequency of the transmission output shaft or wheel hubs. This calculation relies on a static assumption of the tire's rolling radius.In the real world, this radius is a moving target. As tire tread wears down or inflation pressure drops, the effective diameter shrinks. A smaller tire completes more rotations to cover the same distance, forcing the ECU to report a higher speed than reality. Furthermore, many OEMs implement a 'positive offset'—often 2% to 5%—as a legal buffer to ensure the speedometer never under-reports velocity.
2. The GNSS Standard: Doppler Shift vs. Displacement
Smartphones bypass mechanical variables by communicating with a constellation of satellites. Modern mobile GNSS chips utilize two primary calculation methods:* Positional Displacement: Measuring coordinate changes over micro-intervals ($Velocity = \Delta Distance / \Delta Time$). * Doppler Shift: Measuring the frequency shift of the satellite signal caused by the receiver's motion. This provides an instantaneous velocity vector that is often accurate to within 0.1 m/s under clear-sky conditions.
3. Engineering Challenges: Latency and 'Urban Canyons'
Despite its precision, GPS is not absolute. In high-density environments like downtown Manhattan, satellite signals suffer from multipath interference, bouncing off glass facades and creating 'GPS drift'.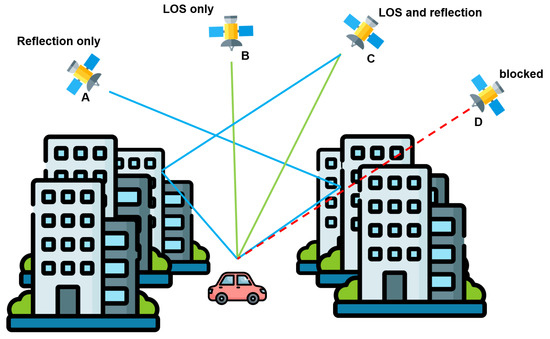
Additionally, consumer-grade smartphone receivers typically operate at a 1Hz refresh rate (one update per second). During rapid acceleration or heavy braking, this 1,000ms sampling window creates a visible lag compared to the real-time mechanical needle. For professional-grade automation, the gold standard is Sensor Fusion—reconciling high-frequency (10Hz+) external GPS data with raw vehicle telemetry to eliminate dashboard ghosts.
