1. The Core Distinction: Scalar vs. Vector
To analyze vehicle motion, we must define the two variables in the context of kinematics: * Speed (Scalar): This represents magnitude only. It is the rate at which an object covers distance ($s = d/t$). If your dashboard indicates 65 MPH, it is reporting speed regardless of your heading. * Velocity (Vector): This requires both magnitude and direction ($v = \Delta x / \Delta t$). To report velocity, the system must provide a vector, such as '65 MPH due North'.2. The Mechanical and Electronic Reality
Traditionally, speedometers utilized a flexible cable to induce eddy currents in a speedcup. Modern vehicles have transitioned to a purely electronic workflow using Hall Effect Sensors.* The Data Source: A magnetic sensor on the transmission output shaft or wheel hub detects the frequency ($f$) of passing gear teeth. * The Logic: The Engine Control Unit (ECU) calculates rotational speed based on this frequency and a hard-coded tire circumference constant. * The Limitation: The sensor is unidirectional in its data output. It cannot distinguish between a vehicle moving North at 60 MPH or South at 60 MPH; it only detects the kinetic rotation of the drivetrain.
3. Sensor Fusion: How Modern Systems 'Create' Velocity
While the speedometer itself is blind to direction, modern vehicle automation 'creates' velocity by fusing data from multiple sensors: * GPS Doppler Shift: High-frequency GPS trackers calculate velocity based on the time-of-flight between coordinates, providing both speed and heading. * Inertial Measurement Units (IMU): Autonomous platforms utilize IMUs containing 3-axis accelerometers and gyroscopes. By tracking angular velocity and linear acceleration, the system determines the vehicle's orientation in 3D space.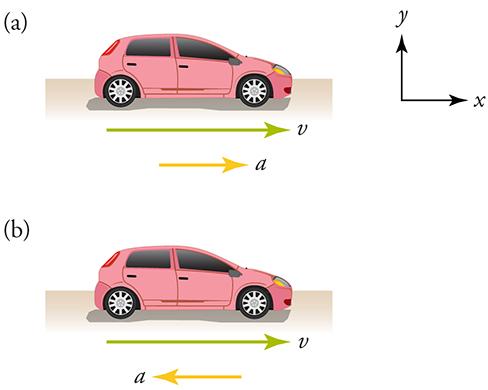
* Magnetometers: Acting as a digital compass, these sensors provide the directional vector that the VSS (Vehicle Speed Sensor) lacks. The ECU fuses the scalar speed from the wheels with the magnetometer's heading to produce a true velocity reading for navigation algorithms.
4. Application in Fleet Automation and Telematics
For telemetry specialists, the distinction is critical for data integrity. Fleet tracking tools require velocity vectors to predict arrival times and optimize routing, whereas a simple speed scalar is only useful for monitoring legal compliance. In autonomous driving, velocity data is essential for 'Path Planning'—the vehicle must know its velocity vector relative to other moving obstacles to execute safe maneuvers.Conclusion
A car speedometer is a master of magnitude but a stranger to direction. In its traditional form, it cannot measure velocity. However, in the context of modern sensor fusion, the speedometer acts as one component in a vast telemetry network. By integrating directional data with rotational pulses, engineers bridge the gap between simple speed and the complex velocity vectors required for the future of automated transportation.